Almost all of the vehicles have been so far composed of decentralized control architecture, which functions in safety, infotainment, powertrain, and drivetrain domains In the middle of the 2020s, the E/E architecture will shift to centralized composition, which will be connected with every domain and be handled with the integrated control in order to deal with a wide range of transportation/travel/location/charging services and manage with electrified components.
Regarding the safety domain, ADAS Level 2+ has become the mainstream from Level 2, and levels 3 and 4 will be deployed to specific highways and parking lots equipped with HD dynamic map. In harmony with this evolution, V2X data-based ADAS/AD control algorithm has been implemented, and in the middle of the 20’s, Software Defined Network (SDN) will be adapted to dynamically change data transmission patterns and the system structures.
With regard to safety-related sensors such as on-board camera, millimeter wave radar and LiDAR will increase their resolutions from approximately 2M pixels to 4K, and deep learning such as CNN and other advance AI model for image/video data has been hired in order to analyze complicated driving circumstance and then forecast the behavior and trajectory route of vehicles and pedestrians. In millimeter-wave radars, CMOS chip which integrates short-range and long-range detecting capabilities into one solution and 4D by combining 3D and data integral are making progress.
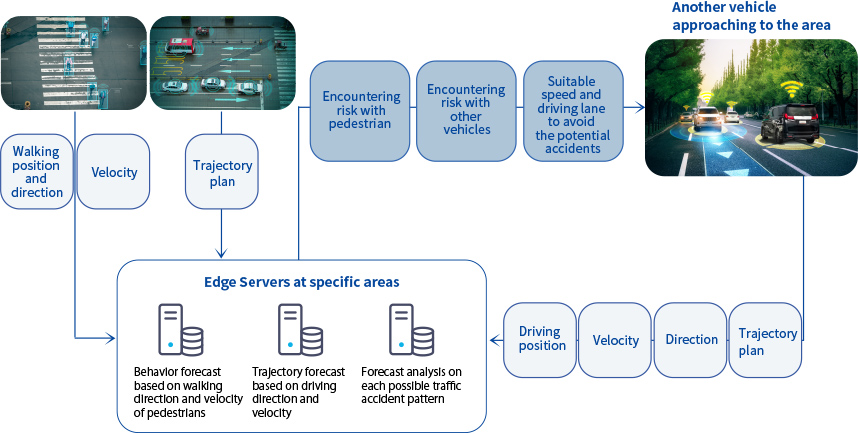
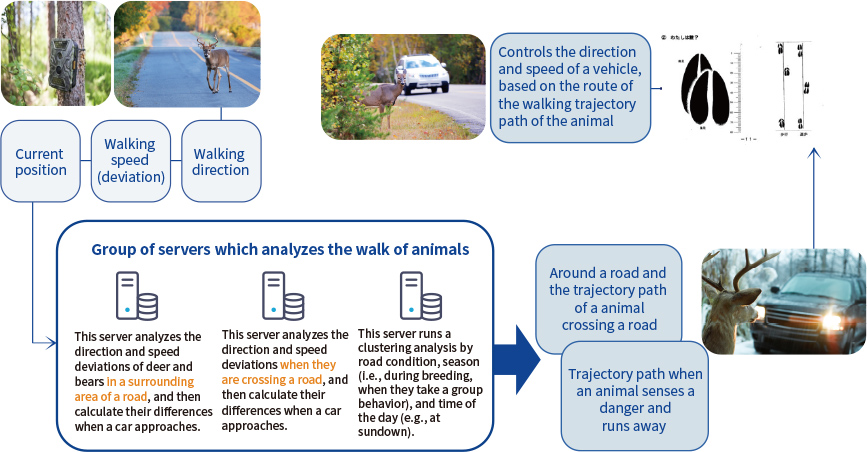
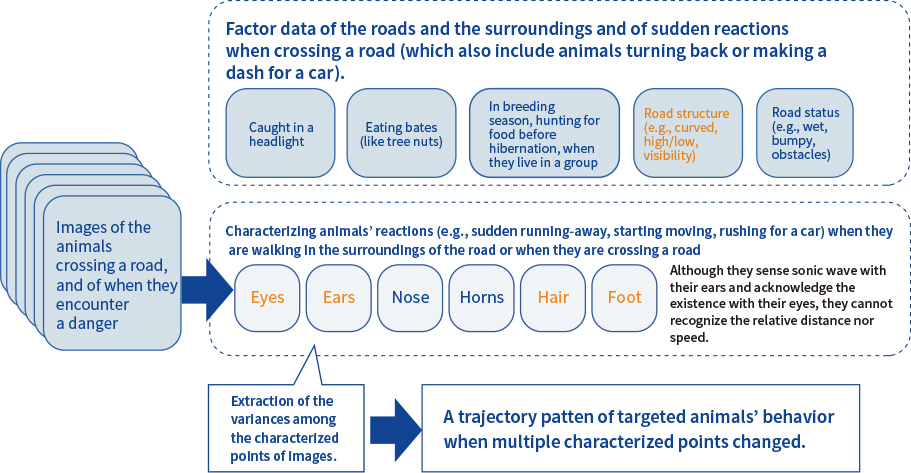
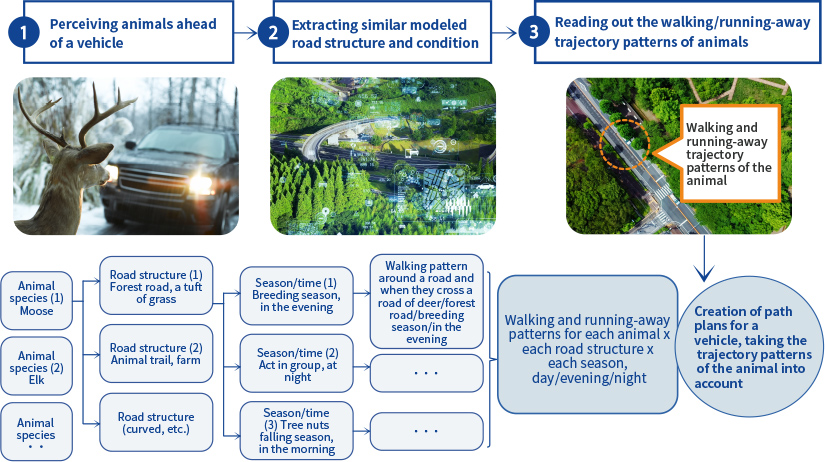
ADAS management based on behavior forecast and trajectory plans
The creation of suitable trajectory plans in accordance with the precise behavior forecasting of other vehicles and pedestrians, and the calculation algorithm to avoid potential accidents, are increasingly in need these days.
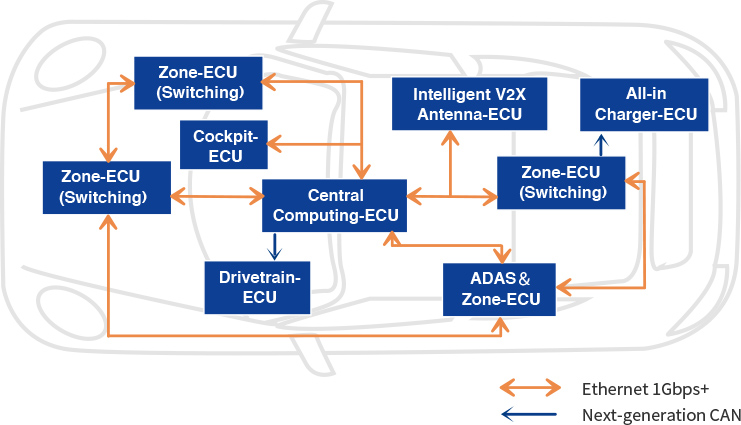
In order to realize the integrated control over infotainment/cockpit, ADAS/AD, body/in-cabin, connected/V2X-related ECU, semiconductors equipped with arithmetic processing capabilities ranging from a few ten trillion to several hundred trillion or even more FLOPS will be used. Furthermore, 1 Gbps and multi-Gbps for data transmission by the Ethernet will be also utilized as a backbone network in vehicle, and they will coexist with the next-generation CAN and existing SerDes signal protocols to build an ultra-high-data-rate network.
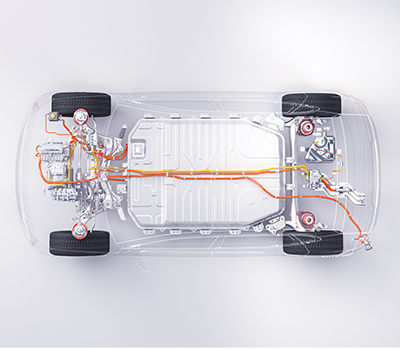
New BEV architecture in the middle of the 2020s
In the middle of the 2020s, the in-vehicle system structure and data transfer patterns will be totally changed; for example, the dynamic management of data transmission in harmony with external services and applications will become active.
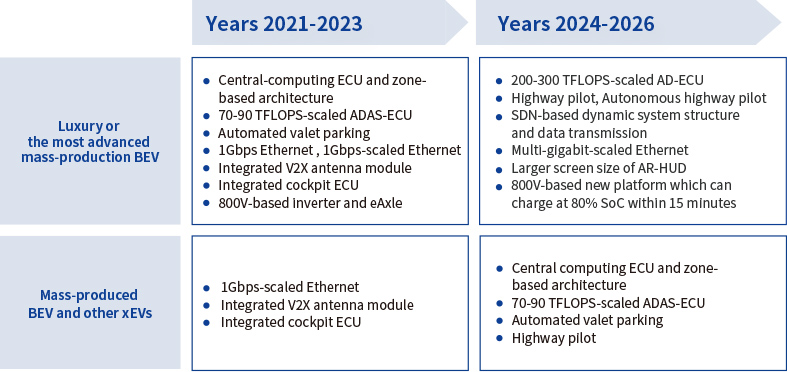
Roadmap of cutting-edge technologies and advanced applications in BEV and other xEVs
We have been researching and engaged in the advanced development projects related to E/E architectures including central computing, zone-ECU, Ethernet, SDN, V2X connection with LTE/5G-NR/DSRC, integrated antenna, and cloud-coordinated vehicle control. By utilizing the know-how, we navigate automotive OEMs, tier1s, and tier2s to the most appropriate direction through our continuous analyses on the latest trends.