これまで自動車は、安全系、インフォテイメント系、パワートレイン系、シャシー系などの各ドメインにおけるセンサやアクチュエータ、その制御ECUが単独、または一部の連携にとどまる「分散型アーキテクチャ」でした。
しかし、走行の安全強化や移動関連サービスの拡充、電動化・充電化などの幅広い対応に向けて、ドメイン間を連携または統合して制御する「中央制御型アーキテクチャ」への移行が進みつつあります。
安全面では、自動運転レベル2から、レベル2+の進化が進んでいますが、高速道路や駐車場などの一定エリアでは、レベル3や4のSOP化も実現されつつあります。この進化に伴い、クラウドから各アプリやサービス、データ、ダイナミックHDマップなどを伝送し、各走行ユースケースに対応していく「V2X連携制御アルゴリズム」も実装されつつあり、将来的には各データ伝送先やシステム構成を動的に変えていくSDNも適用されていく見通しです。
一方で、車載カメラやミリ波レーダ、LiDARなどのセンサ面では、カメラは現行の200万台画素から400万、そして4K化への高画素化と広角化、また畳み込みニューラルネットワーク(CNN)による画像データの深層学習の開発が活発化しています。ミリ波レーダではショートレンジとロングレンジのワンチップ化や3D+データ積分による4D化での対象物体の行動予測対応、LiDARではミリ波レーダと同じFMCW方式での相対位置や方向性、速度の偏差取得、そのデータに基づく相対差予測など、いずれも対象物の動きの予測化が進んでいます。
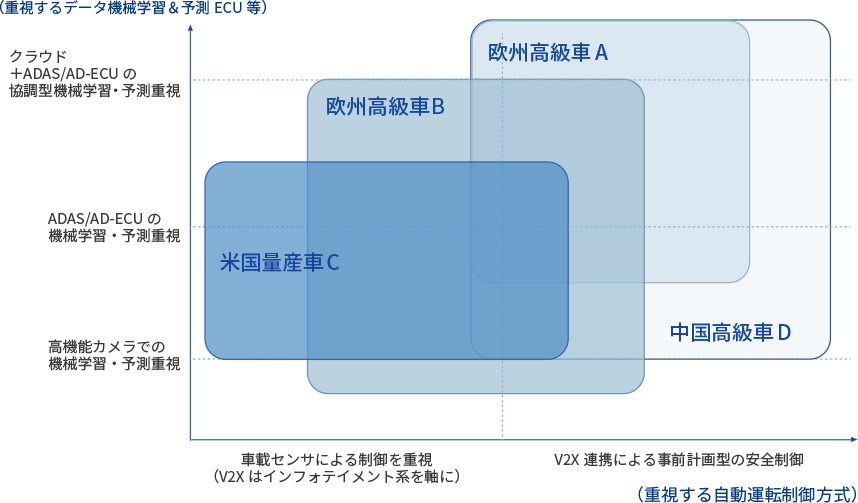
各海外OEMにおける重視する安全制御アルゴリズムのポジション
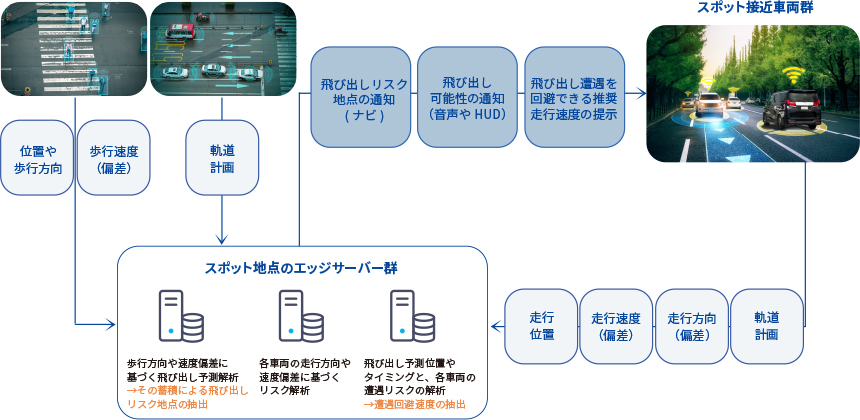
外部クラウドやエッジサーバから伝送されるV2Xデータも取り込んだADASまたはAD制御アルゴリズムが構築されつつあり、スポット直前での制御方式から、数百m以上前方からの事前計画×軌道制御形態に切り替わっていく。
歩行者等行動予測と各接近走行車両の軌道計画共有による出会回避システム
事前計画型になるため、出会い可能性がある他車両や歩行者・自転車・動物等の行動予測の精緻化、その予測アルゴリズムを基にした最適な軌道計画づくりが肝になってくる。
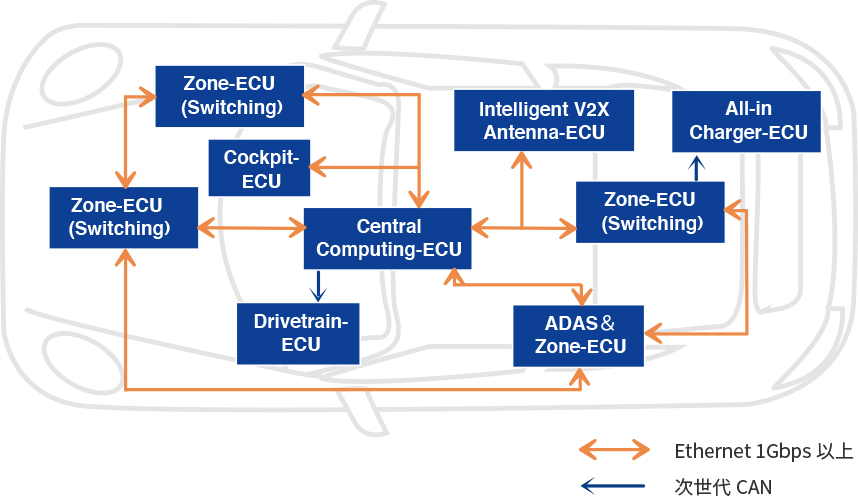
これらを有機的に連携した統合制御するため、車両の複数ドメインのECU機能を統合する動きが活発化しており、インフォテイメント系のコックピットECU、安全系のADASまたはAD-ECU、ボディ系とサーバ的機能のセントラルコンピュータECU、各無線通信コネクティッドを統合したV2XアンテナECUにおいて、数十兆から数百兆FLOPS以上の演算処理を持つ半導体が適用されつつあります。駆動系や充電系のドライブトレーンECUも含めて、これら統合ECU間のデータ高速伝送を図るために、ギガビット以上の通信Ethernetを車載バックボーンネットワーク部などで導入し、従来CANやSerDes系と共存でスイッチングするゾーンECUなども実装されていく見込みです。
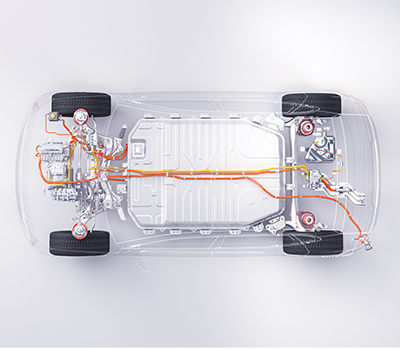
20年代頃の800V-BEVの車載アーキテクチャ
20年代中頃から、外部のサービスやアプリ等に応じて、車載システム構成などを動的に変更管理するアーキテクチャーが構築されていく。
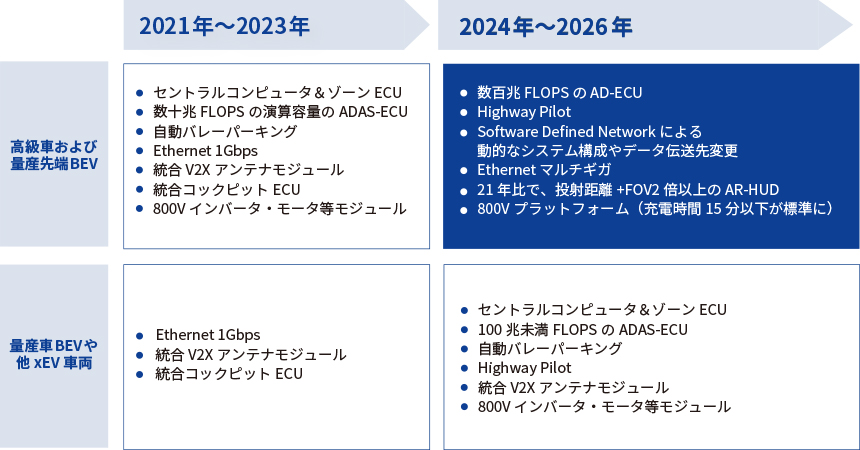
高級先端BEVと量産車の新技術実装ロードマップ
当社では、欧州・米国・中国における、これら車載アーキテクチャやセントラルコンピュータ・ゾーンECU、Ethernet、ソフトウェアデファインドのSDNコントローラ、LTE・5G-NR・ミリ波帯のC-V2X&DSRC等の統合アンテナモジュール、クラウドと車両協調制御システム、カメラやミリ波レーダ、LiDAR等の安全系センサ、そしてコア半導体のGPUやCPU、AIアクセラレータなどの最新動向を分析し続け、それぞれの変化を先取りした開発や最適な方向性等の対策案を提供しております。